Surface Roughness Scan¶
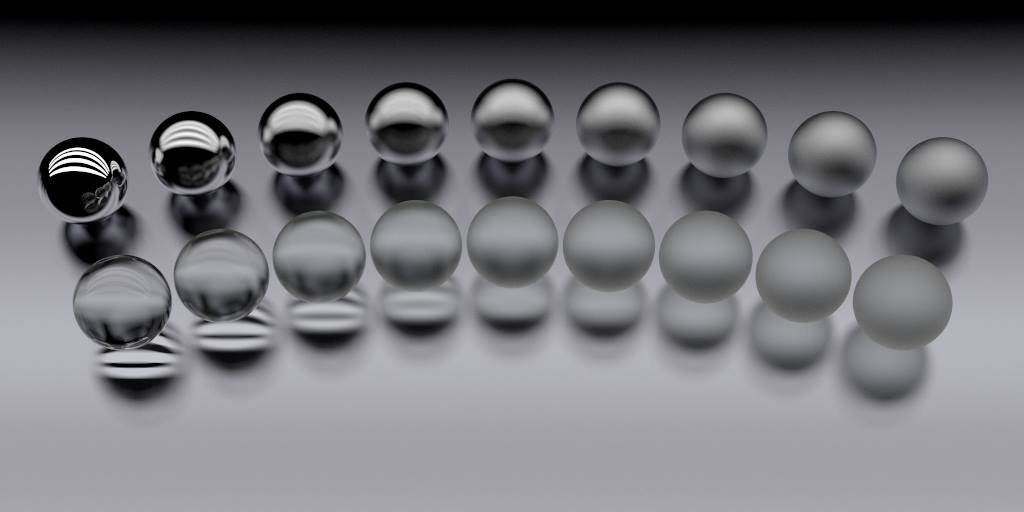
Demonstration of the roughen material modifier. The back row is aluminium and the front row is glass. The surface roughness is increased from left to right from 0 to 50%.
from matplotlib.pyplot import *
from raysect.optical import World, translate, rotate, Point3D, d65_white
from raysect.primitive import Sphere, Box, Cylinder
from raysect.optical.observer import PinholeCamera, RGBPipeline2D, RGBAdaptiveSampler2D
from raysect.optical.material import Lambert, UniformSurfaceEmitter, Roughen
from raysect.optical.library import *
"""
Roughen Modifier
================
Demonstration of the roughen material modifier. The back row is aluminium and
the front row is glass. The surface roughness is increased from left to right
from 0 to 50%.
"""
world = World()
angle_increments = [-4, -3, -2, -1, 0, 1, 2, 3, 4]
roughness_scan = [0, 0.0625, 0.125, 0.1875, 0.25, 0.3125, 0.375, 0.4375, 0.5]
# glass spheres
angle = 6
distance = 3
radius = 0.15
for i in range(9):
roughness = roughness_scan[i]
increment = angle_increments[i]
# use raw material if roughness = 0
if roughness == 0:
material = schott("N-BK7")
else:
material = Roughen(schott("N-BK7"), roughness)
Sphere(radius, world,
transform=rotate(increment * angle, 0, 0) * translate(0, radius + 0.00001, distance),
material=material)
# metal spheres
angle = 6
distance = 3.6
radius = 0.15
for i in range(9):
roughness = roughness_scan[i]
increment = angle_increments[i]
# use raw material if roughness = 0
if roughness == 0:
material = Aluminium()
else:
material = Roughen(Aluminium(), roughness)
Sphere(radius, world,
transform=rotate(increment * angle, 0, 0) * translate(0, radius + 0.00001, distance),
material=material)
# diffuse ground plane
Box(Point3D(-100, -0.1, -100), Point3D(100, 0, 100), world, material=Lambert())
# four strip lights
Cylinder(0.5, 1.0, world, transform=translate(0.5, 5, 8) * rotate(90, 0, 0), material=UniformSurfaceEmitter(d65_white, 1.0))
Cylinder(0.5, 1.0, world, transform=translate(0.5, 5, 6) * rotate(90, 0, 0), material=UniformSurfaceEmitter(d65_white, 1.0))
Cylinder(0.5, 1.0, world, transform=translate(0.5, 5, 4) * rotate(90, 0, 0), material=UniformSurfaceEmitter(d65_white, 1.0))
Cylinder(0.5, 1.0, world, transform=translate(0.5, 5, 2) * rotate(90, 0, 0), material=UniformSurfaceEmitter(d65_white, 1.0))
# observer
rgb = RGBPipeline2D(display_unsaturated_fraction=0.96, name="sRGB")
sampler = RGBAdaptiveSampler2D(rgb, ratio=10, fraction=0.2, min_samples=500, cutoff=0.01)
camera = PinholeCamera((1024, 512), fov=42, pipelines=[rgb], frame_sampler=sampler, transform=translate(0, 3.3, 0) * rotate(0, -47, 0), parent=world)
camera.spectral_rays = 1
camera.spectral_bins = 15
camera.pixel_samples = 250
# start ray tracing
ion()
name = 'modifier_roughen'
timestamp = time.strftime("%Y-%m-%d_%H-%M-%S")
render_pass = 1
while not camera.render_complete:
print("Rendering pass {}...".format(render_pass))
camera.observe()
rgb.save("{}_{}_pass_{}.png".format(name, timestamp, render_pass))
print()
render_pass += 1
ioff()
rgb.display()