Ray Intersection Points¶
Rays are launched in the same way as the pinhole camera. The simple scene consists of the Stanford bunny model sitting on a platform. For every ray that is launched, the cartesian hit point of the ray with the materials in the scene (rabit and floor) is recorded. In Figure 1 the 3D hit point for each ray in the camera is plotted in 3D space. In Figure 2 the z coordinate of each hit point is scaled and plotted to indicate distance from the camera. Both methods allow simple visualisation of a scene and extraction of intersection geometry data.
- Bunny model source:
Stanford University Computer Graphics Laboratory http://graphics.stanford.edu/data/3Dscanrep/ Converted to obj format using MeshLab
# External imports
from os import path
from numpy import tan, pi as PI
import numpy as np
import matplotlib.pyplot as plt
# do not remove the following import or the 3D plotting will break
from mpl_toolkits.mplot3d import Axes3D
# Internal imports
from raysect.core.ray import Ray as CoreRay
from raysect.optical import World, translate, rotate, Point3D, d65_white, ConstantSF, Node, Vector3D
from raysect.optical.material.emitter import UniformVolumeEmitter
from raysect.optical.material import Lambert
from raysect.primitive import Box, Subtract
from raysect.primitive.mesh import Mesh
from raysect.optical.library import schott
"""
A demo of Ray intersection hit points
----------------------------------
Rays are launched in the same way as the pinhole camera. The simple scene consists
of the Stanford bunny model sitting on a platform. For every ray that is launched,
the cartesian hit point of the ray with the materials in the scene (rabit and floor)
is recorded. In Figure 1 the 3D hit point for each ray in the camera is plotted in
3D space. In Figure 2 the z coordinate of each hit point is scaled and plotted to
indicate distance from the camera. Both methods allow simple visualisation of a
scene and extraction of intersection geometry data.
Bunny model source:
Stanford University Computer Graphics Laboratory
http://graphics.stanford.edu/data/3Dscanrep/
Converted to obj format using MeshLab
"""
world = World()
mesh_path = path.join(path.dirname(__file__), "../resources/stanford_bunny.rsm")
mesh = Mesh.from_file(mesh_path, parent=world, transform=rotate(180, 0, 0))
# LIGHT BOX
padding = 1e-5
enclosure_thickness = 0.001 + padding
glass_thickness = 0.003
light_box = Node(parent=world)
enclosure_outer = Box(Point3D(-0.10 - enclosure_thickness, -0.02 - enclosure_thickness, -0.10 - enclosure_thickness),
Point3D(0.10 + enclosure_thickness, 0.0, 0.10 + enclosure_thickness))
enclosure_inner = Box(Point3D(-0.10 - padding, -0.02 - padding, -0.10 - padding),
Point3D(0.10 + padding, 0.001, 0.10 + padding))
enclosure = Subtract(enclosure_outer, enclosure_inner, material=Lambert(ConstantSF(0.2)), parent=light_box)
glass_outer = Box(Point3D(-0.10, -0.02, -0.10),
Point3D(0.10, 0.0, 0.10))
glass_inner = Box(Point3D(-0.10 + glass_thickness, -0.02 + glass_thickness, -0.10 + glass_thickness),
Point3D(0.10 - glass_thickness, 0.0 - glass_thickness, 0.10 - glass_thickness))
glass = Subtract(glass_outer, glass_inner, material=schott("N-BK7"), parent=light_box)
emitter = Box(Point3D(-0.10 + glass_thickness + padding, -0.02 + glass_thickness + padding, -0.10 + glass_thickness + padding),
Point3D(0.10 - glass_thickness - padding, 0.0 - glass_thickness - padding, 0.10 - glass_thickness - padding),
material=UniformVolumeEmitter(d65_white, 50), parent=light_box)
fov = 45
num_pixels = 256
# Launch rays using the same geometry calculations as a pinhole camera
image_width = 2 * tan(PI / 180 * 0.5 * fov)
image_delta = image_width / num_pixels
image_start_x = 0.5 * num_pixels * image_delta
image_start_y = 0.5 * num_pixels * image_delta
x_points = []
y_points = []
z_points = []
z_show = np.zeros((num_pixels, num_pixels))
for ix in range(num_pixels):
for iy in range(num_pixels):
# generate pixel transform
pixel_x = image_start_x - image_delta * ix
pixel_y = image_start_y - image_delta * iy
# calculate point in virtual image plane to be used for ray direction
origin = Point3D().transform(translate(0, 0.16, -0.7) * rotate(0, -12, 0))
direction = Vector3D(pixel_x, pixel_y, 1).normalise().transform(translate(0, 0.16, -0.7) * rotate(0, -12, 0))
intersection = world.hit(CoreRay(origin, direction))
if intersection is not None:
hit_point = intersection.hit_point.transform(intersection.primitive_to_world)
x_points.append(hit_point.z)
y_points.append(hit_point.x)
z_points.append(hit_point.y)
z_show[iy, ix] = hit_point.z
else:
# add small offset so background is black
z_show[iy, ix] = 0.1
fig = plt.figure()
ax = fig.add_subplot(111, projection='3d')
ax.scatter(x_points, y_points, z_points, c='k', marker='.')
ax.set_xlabel('X Label')
ax.set_ylabel('Y Label')
ax.set_zlabel('Z Label')
plt.figure()
plt.imshow(z_show, cmap=plt.cm.Greys)
plt.show()
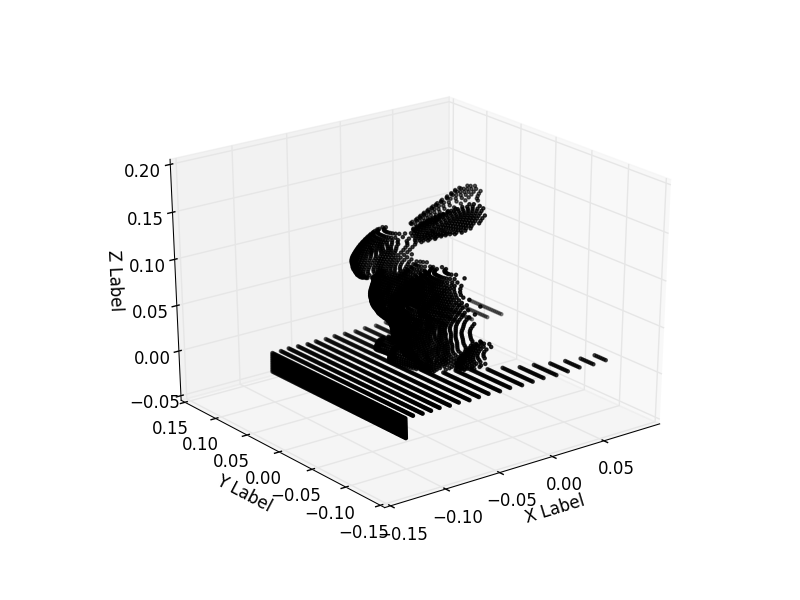
The 3D intersection point of each camera ray with the materials in the scene is recorded and plotted as 3D points.¶
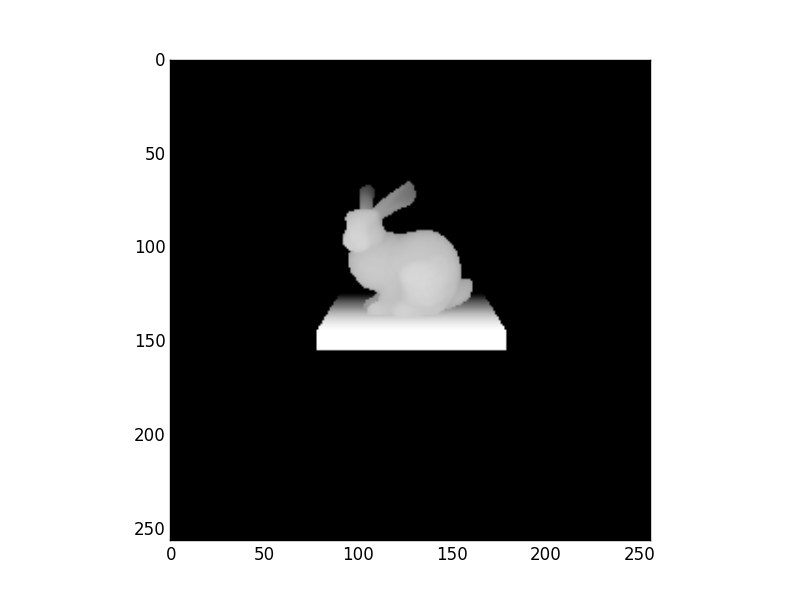
The Z coordinate of each intersection point is scaled and plotted to indicate distance from the camera. This allows a crude form of scene visualisation.¶